

DreamVu Visual Intelligence Software
THE LEADER IN OMNIDIRECTIONAL 3D VISION SYSTEMS
Overview
A suite of software products designed to handle omnidirectional 3D vision data
DreamVu Vision Intelligence Software can be licensed to accelerate your time to market. Each module is developed to maximize the benefits of DreamVu’s family of omnidirectional 3D vision systems. So not only can your robots perform better, but you’ll get them to be deployed faster.
ROBOT MOBILITY AND NAVIGATION
- Floor Mapping
A floor map is important for an autonomous mobile robot. It informs the navigation system of obstacle locations. It assists with wall tracking and staircase edges. With the DreamVu Floor Mapping solution, an AMR has an accurate and dense floor map for highly efficient navigation. - Obstacle Detection & Obstacle Avoidance – ODOA
As an AMR maneuvers through a cluttered and dynamic environment, it’s important to detect and avoid obstacles with great efficiency. With the DreamVu ODOA solution, not only are obstacles in front of the AMR detected, but obstacles approaching from behind or the sides can also be detected and avoided. - Visual Simultaneous Localization & Mapping – vSLAM
Using vision to create a map and to localize an AMR is efficient since in addition to the point-based map, valuable information such as object recognition is included so the AMR can differentiate between temporary obstacles and physical plant. The DreamVu vSLAM solution provides maps that are more thorough and accurate for improved navigation.
SITUATIONAL AWARENESS
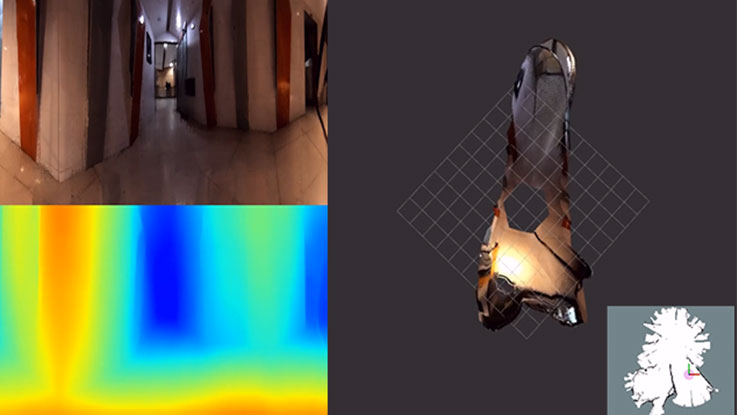
- 3D Mapping
Unlike non-vision based sensors, DreamVu 3D Mapping allows high-resolution and accurate 3D maps to be created in color and with object recognition. This allows for a more immersive experience for improved data analysis. - People Detection
With the DreamVu People Detection solution, zero false positives can be achieved while also knowing the distance of each person. Depth based zones can be created so that safety perimeters can be established. - Object Recognition
An important aspect of computer vision is the ability to recognize objects. With the DreamVu Object Recognition solution, an entire scene can be processed in each frame for a very compute efficient solution.
Details
Designed for DreamVu omnidirectional 3D cameras
APIs for seamless integration into existing software stack
Save time and money with validated software
Flexible licensing models available
Images

Videos

Sorry, you must be logged in to view the rest of this page
Please log in or create an account to view more details.
Log in or Sign UpCustomers and Partners
Sorry, you must be logged in to view the rest of this page
Please log in or create an account to view more details.
Log in or Sign UpDocuments
Sorry, you must be logged in to view the rest of this page
Please log in or create an account to view more details.
Log in or Sign UpExpert Analysis
Sorry, you must be logged in to view the rest of this page
Please log in or create an account to view more details.
Log in or Sign UpExpert Analysis

DreamVu Visual Intelligence Software

")


